
MESSI Dataset
MESSI: A Multiple-Elevation Semantic Segmentation Image dataset for aerial urban environment exploration
Authors: Barak Pinkovich, Boaz Matalon, Ehud Rivlin and Hector Rotstein
Updates
- 23/05/2024 v1.0 release
Overview
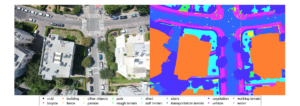
Semantic segmentation has recently been proposed as a detection sensor searching for an appropriate landing place in a dense urban environment. This provocative idea is motivated by the availability of drones capable of flying at various altitudes over the environment while taking images with correspondingly diverse spatial resolutions, together with emerging deep learning tools for performing the segmentation in almost real-time. Unfortunately, existing datasets collected by drones fail to provide the altitude (or elevation) richness required to evaluate the new search approach. To circumvent this difficulty, a new dataset was collected using images taken by a drone flying at different altitudes in a relatively dense urban environment. The data was collected flying on a single day over selected areas in the cities of Netanya and Tel Aviv at altitudes that vary from 30, 50, 70, and 100 m and following several straight paths. In addition, images were taken while the drone descended over specific points to facilitate a correlation study of the different segmented results. The dataset consists of 2525 images taken using a high-resolution, downward-looking RGB camera mounted on a remote-controlled drone. The drone was flown by ALTA INNOVATION, a local company licensed to fly over urban areas. V7 was contracted to provide dense-pixel-wise annotations using its data labeling software. In addition to the annotated images, the dataset contains localization data computed by the drone using an INS/GPS navigation system. MESSI is made available to the general research community to facilitate the development of new algorithms for semantic segmentation in urban environments. The dataset can also be used to explore new visual odometry algorithms in urban environments.
Platform and Equipment
The drone used to collect images is a remotely controlled DJI MAVIC 2 PRO. Due to regulation limitations, the drone was flown at line-of-sight over streets. The downward-looking RGB camera was a DJI-FC6310R with a 5472×3648 resolution. Images in Agamim Path and IrYamim Path were captured so that the two subsequent ones have an approximately 75% overlap between images. Images in Agamim Descend were captured between about 120 m and 10 m, every 1 m, with decreasing overlap between images. The INS/GPS uses RTK positioning for maximum accuracy. Orientation was obtained from a magnetometer carefully placed on the platform to minimize magnetic disturbances.
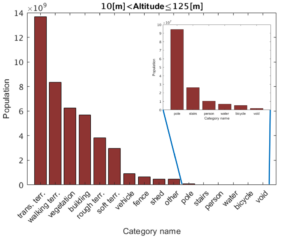
Annotated Data
Images were annotated using the V7 image annotation tool, designed to speed up the annotation of images captured with a relatively large overlap area. The figure below shows the histogram of the combined training and validation sets, where the annotations include 16 classes (including the “void” class of unannotated pixels).
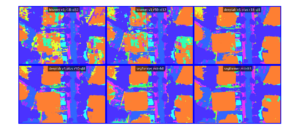
Benchmark models Inference
Presented below is an example of the output for each of the models used for the benchmark
MESSI DATASET
├───Test
│ ├───6DOF
│ │ ├───Ha-Medinah Square
│ │ │ └───Path
│ │ │ └───60
│ │ └───IrYamim
│ │ └───Path
│ │ ├───30
│ │ ├───...
│ │ └───100
│ ├───annotations
│ │ ├───Ha-Medinah Square
│ │ │ └───Path
│ │ │ └───60
│ │ └───IrYamim
│ │ └───Path
│ │ ├───30
│ │ ├───...
│ │ └───100
│ └───images
│ ├───Ha-Medinah Square
│ │ └───Path
│ │ └───60
│ └───IrYamim
│ └───Path
│ ├───30
│ ├───...
│ └───100
└───Train and Val
├───6DOF
│ └───Agamim
│ ├───Descend
│ │ ├───100_0001
│ │ ├───...
│ │ └───100_0043
│ └───Path
│ ├───A
│ │ ├───30
│ │ ├───...
│ │ └───100
│ ├───B
│ │ ├───30
│ │ ├───...
│ │ └───100
│ └───C
│ ├───30
│ ├───...
│ └───100
├───annotations
│ └───Agamim
│ ├───Descend
│ │ ├───100_0001
│ │ ├───...
│ │ └───100_0043
│ └───Path
│ ├───A
│ │ ├───30
│ │ ├───...
│ │ └───100
│ ├───B
│ │ ├───30
│ │ ├───...
│ │ └───100
│ └───C
│ ├───30
│ ├───...
│ └───100
└───images
└───Agamim
├───Descend
│ ├───100_0001
│ ├───...
│ └───100_0043
└───Path
├───A
│ ├───30
│ ├───...
│ └───100
├───B
│ ├───30
│ ├───...
│ └───100
└───C
├───30
├───...
└───100
Citation
@article{
pinkovich2025messi,
title={{MESSI}: A Multi-Elevation Semantic Segmentation Image Dataset of an Urban Environment},
author={Barak Pinkovich and Boaz Matalon and Ehud Rivlin and Hector Rotstein},
journal={Transactions on Machine Learning Research},
issn={2835-8856},
year={2025},
url={https://openreview.net/forum?id=ayWqZ1wyIv},
note={}
}
License
All datasets and code on this page are copyright by us and published under the Creative Commons Attribution-NonCommercial-ShareAlike 3.0 License.